

Le Télescope est installé en poste fixe dans un abri à toit roulant. Toit à déplacement manuel. Les observations se font à distance à l’aide d’un ordinateur sous linux avec la suite logiciel KSTARS, EKOS, INDI.
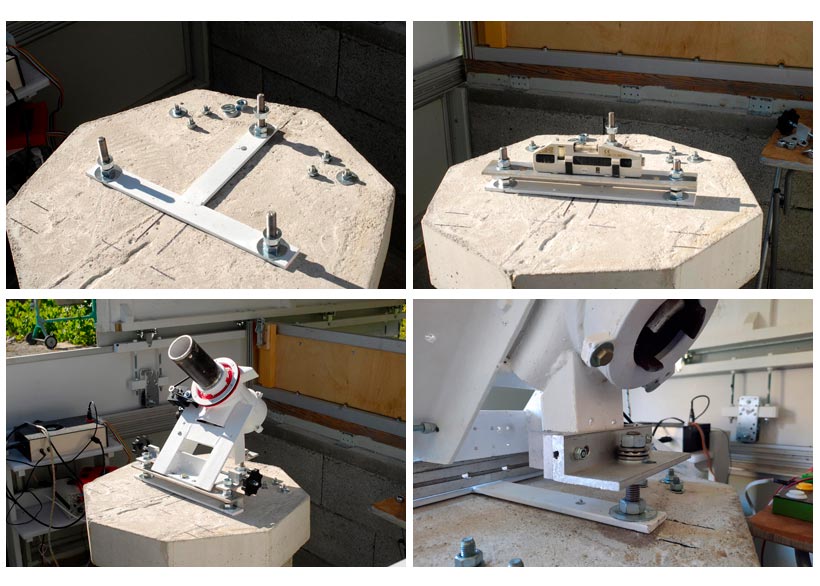
La monture repose sur un pilier en béton non solidaire de la dalle recouvrant le sol.
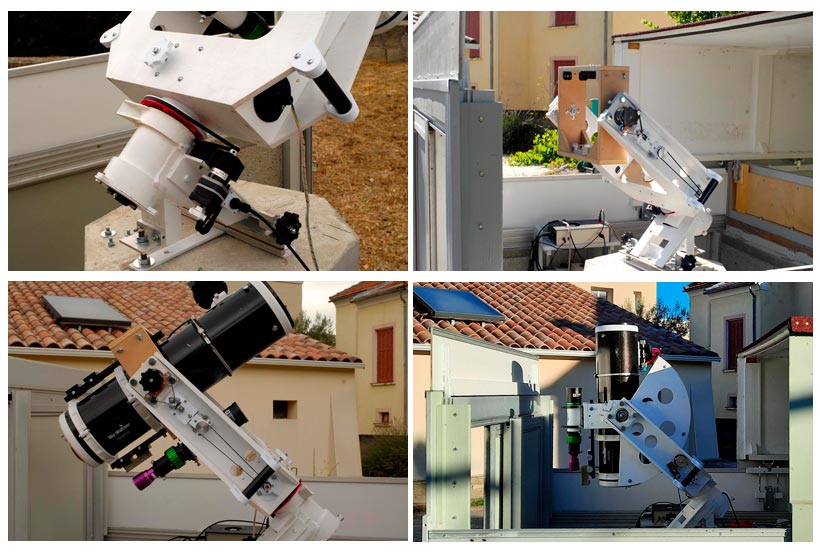
La monture posée sur le pilier est réglage en azimut et déclinaison. Dans un premier temps l’axe de déclinaison était entrainé par un réducteur à courroie réalisé en impression 3D (PETG), pour éviter le « back-slash » un montage avec galet et quart de cercle a remplacé les longues courroies du réducteur.
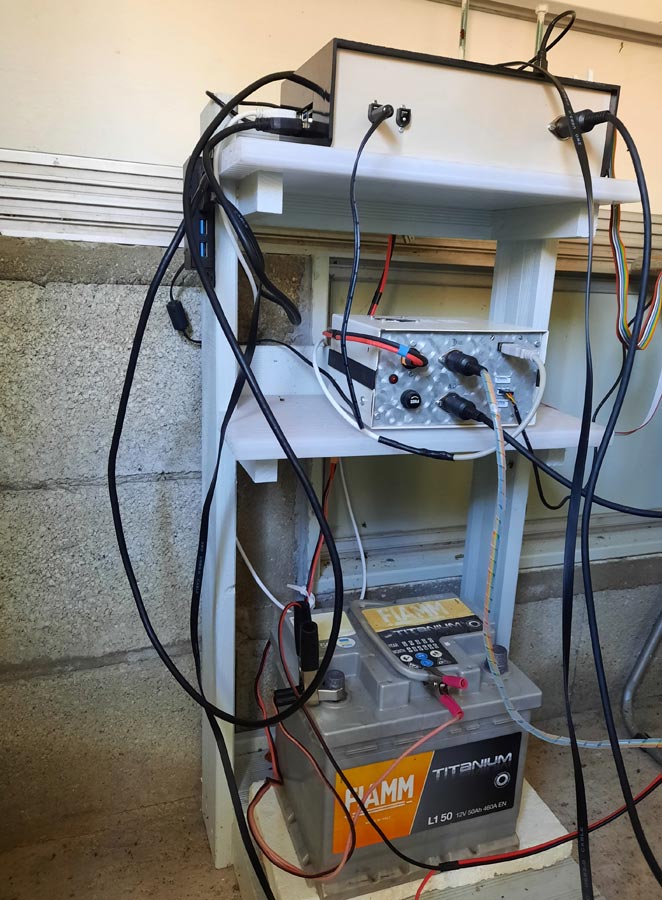
Le pilotage du télescope et de la monture est effectué en mode « remote » avec une liaison WIFI. Ensemble comprenant un Raspberry 4, un dispositif de mise au point (carte Teensy 3.2) , une motorisation LX200 OnStep (carte teensy 3.2). Un hub usb3 auto alimenté et une batterie 12v pour alimenter le tout.